Roborigger 動態定位器主要功能 :
* 無線遠端遙控,平均可遙控距離150公尺(433Mhz)
* 可用在風速較高( 25-30 公里/小時)的操作環境
* 遙控器可設定有 2 個預設方向記憶,在現場可以簡化重複操作,節省時間提高效率
* 電池供電,可持續使用至少 12 小時
* 可以整合負載管理 (選項)
* 具有靜態影像捕捉和視訊串流功能的能力
Roborigger 動態定位器
Roborigger 動態定位器是一種透過起重設備的吊鉤或勾環,連接到起重機鋼索鋼纜的遠端遙控控制方向的機器設備。
Roborigger 動態定位器可以精準的控制吊掛物件在吊裝時的方向,並且可以將其維持與固定在適當的位置方向,無論風向如何也可以維持固定方向,這意味著不再需要地面的索具吊裝人員(Rigger)來控制管理吊裝物件的旋轉或著陸,經濟又安全。
== 不同型號可供選擇 ==

ROBORIGGER 動態定位器產品說明 :
ROBORIGGER 動態定位器可以精準的控制與調整吊載物件的定向(方向/方位),而無需Rigger(索具工)在吊載物件的下方或附近進行拉扯控制與調整。吊掛物的方向可以由遙控器持有人員(例如吊車司機)對遙控器進行控制。 這可以降低了人員受傷的風險(例如:掉落或碰撞),確實可以提高人員工作的安全性與作業的效率,而且因為吊掛效率的提高也進而增加營運的績效。
由於不需要索具工(Rigger)調整吊掛物,因此通常可以減少至少一個人在物件附近下方利用人工進行物件的方向調整與控制,因此人員更精減而且可以讓操作速度更快.。因為負載在吊裝過程中是在空中進行旋轉來定向的,一旦方向角度確定好之後,物件就可以立即準確的下降高度,並且能快速達到指定位置,對於上升下降要通過較為狹窄的通道空間或較小的迴轉空間最為適合。
Roborigger 動態定位器還允許進行具有挑戰性的任務,可以較輕鬆安全地進行具有較大風大時(高風阻)的吊掛物件(例如:大型牆板/工字樑/鋼筋/長型管狀物…),可以在強風中提升顯著提高了起重機的利用率與吊裝/施工安裝的安全。 這些顯著且可量化的成本節省將在不到很快的時間內就可以獲得回報。
ROBORIGGER 動態定位器是利用陀螺儀產生的慣性力來旋轉與調整吊載物件的方向。
ROBORIGGER 動態定位器是它是利用無線遙控器來進行控制的,使用者手上拿著遙控器在現場進行遙控,利用順時針按鈕和逆時針按鈕進行旋轉吊載物的方向,每台遙控器可以儲存 2 組記憶角度方位,使用單一按鈕就可以將吊載物旋轉到記憶的位置方向,精確快速提高載送與組裝效率。 無論風力方侷或起重吊車的迴轉位置是如何,Roborigger 都會持續保持吊載物的真實方位與方向。
ROBORIGGER 動態定位器也可選配備遙控電動吊鉤,讓操作員也可以透過無線遙控的方式自遠端釋放吊載物,該吊鉤具有內建的防呆保護機構,可以防止意外脫鉤釋放。
Roborigger 動態定位器內部還包括一組攝影機(將物件記錄)和一組重量感測器(確保吊載物没有超載),它可以透過 wifi 或 3G/4G的無線網路連接互聯網,以便將所有吊載的過程都可以記錄在互聯網資料庫中包含日期、時間、地點、重量和高解析度的物件影像。 還可以記錄負載ID。 物聯網平台軟體可以提供許多營運吊掛的統計分析,是工作安全很好的工具,也是支援改善吊載效率的關鍵工具。 該營運效率軟體也可以自動產生每月營運和生產力報告。

Roborigger CEO Mr. Derick Markwell 站在AR15旁邊
吊掛作業專用 動態定位器
動態定位 Dynamic Positioning (DP) 可能是繼指南針之後,船上最重的導航系統。” - 職業海員,《海事工業雜誌》
動態定位是一種電腦控制的系統,通過控制與調整自身的螺旋槳和推進器,它能夠自動的保持船舶的位置和航向。它的位置參考,來自於傳感器與風傳感器與運動傳感器和陀螺羅經(Compass)的諸多資料相結合,經過電腦計算之後它能夠自動調節船舶的穩定。
採用DP的船舶類型包括船舶和半潛式移動海上鑽井平台,海洋研究船,電纜船,海上施工船和遊輪。 ……資料來源 : 维基百科(英文)
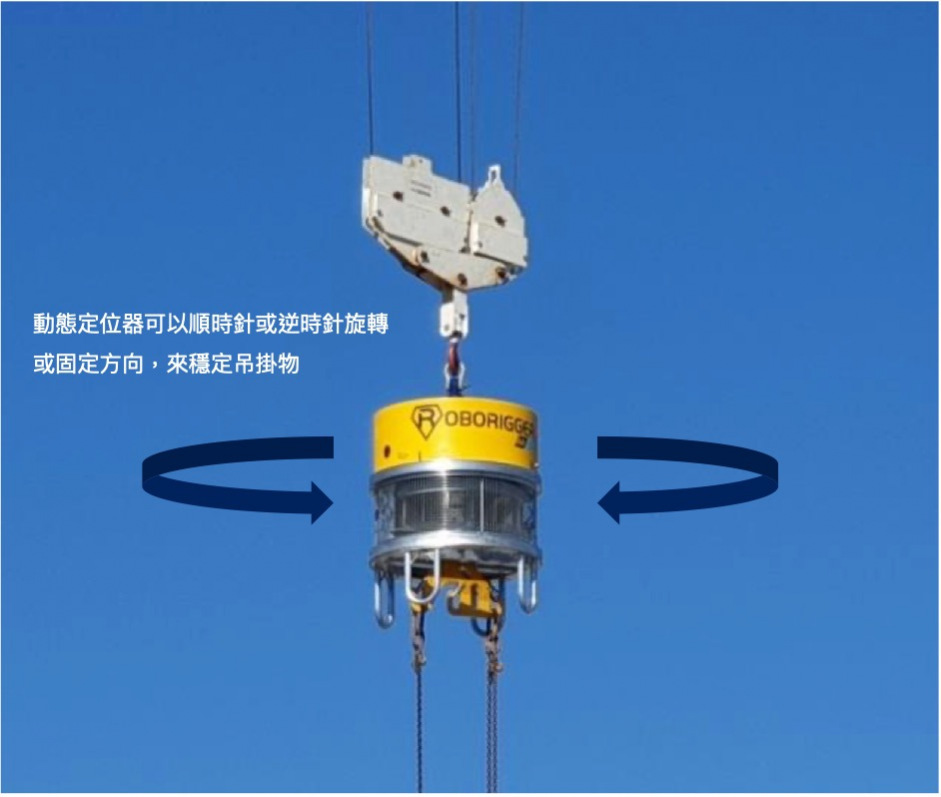
進行吊掛作業時,由於吊掛物件會隨吊車鋼纜運行輸送過程中高度方向的改變,會產生吊掛物件旋轉,吊掛物件可能會撞到人員或外部其它物件結構,造成經濟損失與人員傷害。 因此要使用吊掛作業專用動態定位器,在吊掛作業期間來穩定吊掛物件。
Roborigger 全系列選配功能:
可提供腳踏板控制裝置(必須先選購10按鍵無線遙控器),可以允許吊車/起重機操作員利用腳來控制操作吊掛物順時針/逆時針方向旋轉, 這對於需要重複吊掛操作或者吊掛距離較遠或較高的作業來說,是又安全理想又有效率的選擇。
Roborigger 全系列選配功能:
10組按鍵遙控器 (多了GO TO 轉到 1 / GO TO 轉到 2 模式的設定與執行共四組按鍵),這2組 GO TO 模式允許記憶 2 組預設方位 A 和 B。 按下任一按鈕l就可以輕易將吊掛物調整到所設定的方位,對於重覆性的吊掛作業,可以快速的完成。
== Roborigger 參與的不同吊掛作業與吊掛物 ==